For example, here is one option how I was able to run with one code all 3 detections. But it looks like a very weird implementation. Can you suggest or show some more correct examples?
Code id just a working example without any cleaning or documentation for testing purposes
import cv2
import numpy as np
from picamera2.devices import Hailo
def letterbox_image(img, size):
iw, ih = img.shape[1], img.shape[0]
w, h = size
scale = min(w / iw, h / ih)
nw, nh = int(iw * scale), int(ih * scale)
image_resized = cv2.resize(img, (nw, nh), interpolation=cv2.INTER_LINEAR)
image_padded = np.full((h, w, 3), 128, dtype=np.uint8)
top = (h - nh) // 2
left = (w - nw) // 2
image_padded[top:top + nh, left:left + nw, :] = image_resized
return image_padded, scale, left, top
def extract_detections(hailo_output, original_w, original_h, padded_w, padded_h, scale, pad_left, pad_top, class_names, threshold=0.5):
results = []
for class_id, detections in enumerate(hailo_output):
for detection in detections:
score = detection[4]
if score >= threshold:
y0, x0, y1, x1 = detection[:4]
x0_pixel = int((x0 * padded_w - pad_left) / scale)
y0_pixel = int((y0 * padded_h - pad_top) / scale)
x1_pixel = int((x1 * padded_w - pad_left) / scale)
y1_pixel = int((y1 * padded_h - pad_top) / scale)
bbox = (x0_pixel, y0_pixel, x1_pixel, y1_pixel)
results.append([class_names[class_id], bbox, score])
return results
def draw_detections(img, detections):
for class_name, bbox, score in detections:
x0, y0, x1, y1 = bbox
label = f"{class_name}"
cv2.rectangle(img, (x0, y0), (x1, y1), (0, 255, 0), 2)
cv2.putText(img, label, (x0, y0 - 10), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)
return img
if __name__ == "__main__":
with open("coco.txt", 'r', encoding="utf-8") as f:
class_names_yolo = f.read().splitlines()
hef_one = "/usr/share/hailo-models/yolov8s_h8l.hef"
license_plate_model = "./license_plate_model.hef"
hef_model_ocr = "./license_plate_ocr_new.hef"
class_names = list('0123456789ABCDEFGHIJKLMNOPQRSTUVWXYZ')
with Hailo(hef_one) as hailo:
img = cv2.imread("./cars/car_17.jpg")
original_w, original_h = img.shape[1], img.shape[0]
input_size = (640, 640)
padded_img, scale, pad_left, pad_top = letterbox_image(img, input_size)
frame = cv2.resize(padded_img, (hailo.get_input_shape()[1], hailo.get_input_shape()[0]))
results = hailo.run(frame)
car_detections = extract_detections(results[0], original_w, original_h, input_size[0], input_size[1], scale, pad_left, pad_top, class_names_yolo, threshold=0.5)
if car_detections:
car_x0, car_y0, car_x1, car_y1 = car_detections[0][1]
cropped_car_img = img[car_y0:car_y1, car_x0:car_x1]
cv2.imwrite("detected_car.jpg", cropped_car_img)
plate_detections = []
if car_detections:
with Hailo(license_plate_model) as hailo:
img_car = cv2.imread("./detected_car.jpg")
car_crop_w, car_crop_h = img_car.shape[1], img_car.shape[0]
input_size = (640, 640)
padded_img, scale, pad_left, pad_top = letterbox_image(img_car, input_size)
frame = cv2.resize(padded_img, (hailo.get_input_shape()[1], hailo.get_input_shape()[0]))
results = hailo.run(frame)
plate_detections = extract_detections(results[0], car_crop_w, car_crop_h, input_size[0], input_size[1], scale, pad_left, pad_top, ['license plate'], threshold=0.5)
if plate_detections:
plate_x0, plate_y0, plate_x1, plate_y1 = plate_detections[0][1]
cropped_plate_img = cropped_car_img[plate_y0:plate_y1, plate_x0:plate_x1]
cv2.imwrite("detected_plate.jpg", cropped_plate_img)
ocr_detections = []
if plate_detections:
with Hailo(hef_model_ocr) as hailo:
img_plate = cv2.imread("./detected_plate.jpg")
plate_crop_w, plate_crop_h = img_plate.shape[1], img_plate.shape[0]
input_size = (640, 640)
padded_img, scale, pad_left, pad_top = letterbox_image(img_plate, input_size)
frame = cv2.resize(padded_img, (hailo.get_input_shape()[1], hailo.get_input_shape()[0]))
results = hailo.run(frame)
ocr_detections = extract_detections(results[0], plate_crop_w, plate_crop_h, input_size[0], input_size[1], scale, pad_left, pad_top, class_names, threshold=0.5)
if ocr_detections:
detections_sorted = sorted(ocr_detections, key=lambda x: x[1][0])
license_plate_text = ''.join([det[0] for det in detections_sorted])
print(f"License Plate: {license_plate_text}")
final_img = img.copy()
final_img = draw_detections(final_img, car_detections)
if plate_detections:
plate_x0, plate_y0, plate_x1, plate_y1 = plate_detections[0][1]
adjusted_plate_detections = [[det[0],
(car_x0 + plate_x0 + det[1][0], car_y0 + plate_y0 + det[1][1],
car_x0 + plate_x0 + det[1][2], car_y0 + plate_y0 + det[1][3]),
det[2]] for det in ocr_detections]
final_img = draw_detections(final_img, adjusted_plate_detections)
cv2.imwrite("output_with_all_detections.jpg", final_img)
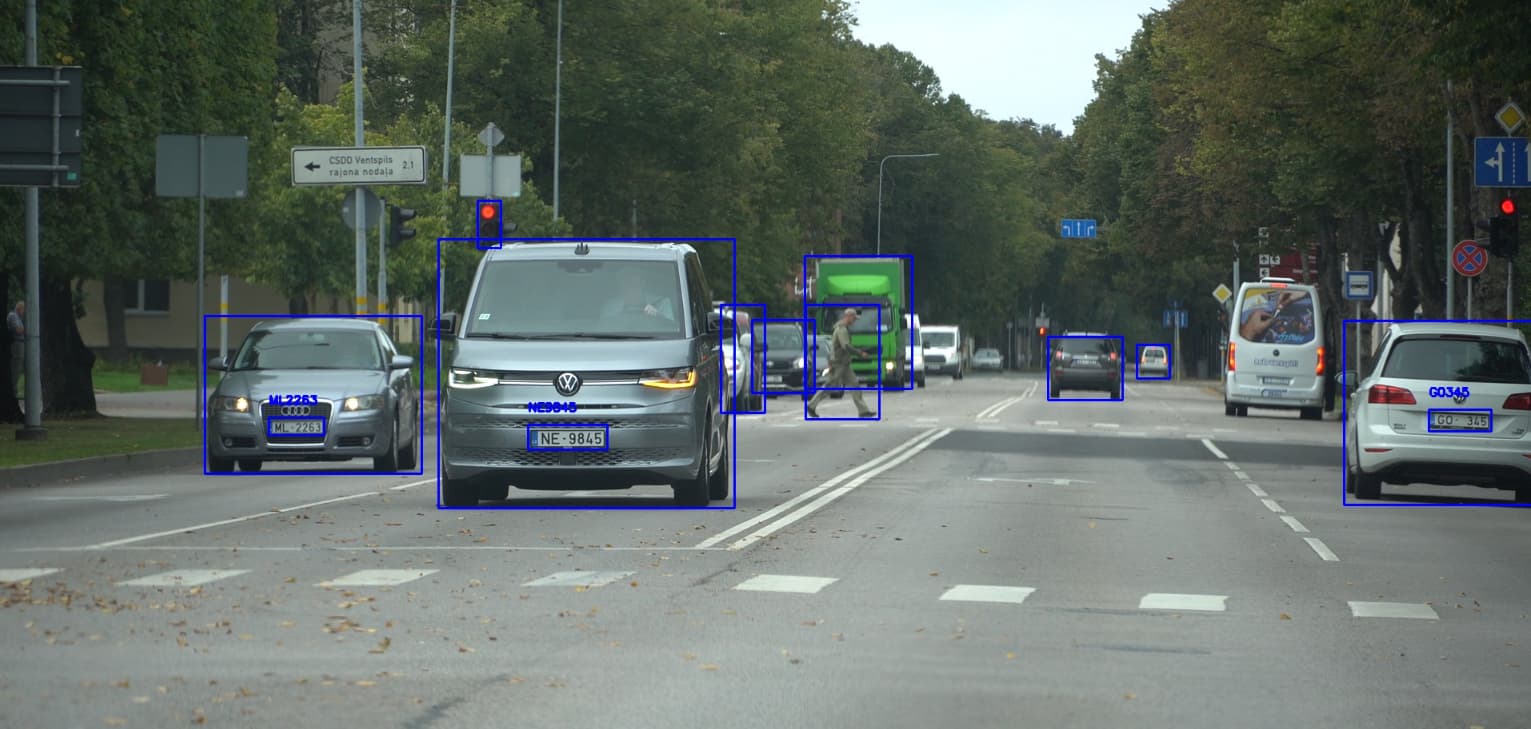
And some results how it works, if someone is interested
But sometimes I get this error, maybe someone knows something about it too?
terminate called after throwing an instance of 'std::system_error'
what(): Resource deadlock avoided
Aborted