/**
* Copyright (c) 2021-2022 Hailo Technologies Ltd. All rights reserved.
* Distributed under the LGPL license (https://www.gnu.org/licenses/old-licenses/lgpl-2.1.txt)
**/
// General includes
#include <iostream>
#include <vector>
// Hailo includes
#include "hailo_xtensor.hpp"
#include "common/math.hpp"
#include "common/tensors.hpp"
#include "common/labels/coco_eighty.hpp"
#include "yolov8pose_postprocess.hpp"
#include "xtensor/xadapt.hpp"
#include "xtensor/xarray.hpp"
#include "xtensor/xcontainer.hpp"
#include "xtensor/xeval.hpp"
#include "xtensor/xtensor.hpp"
#include "xtensor/xindex_view.hpp"
#include "xtensor/xio.hpp"
#include "xtensor/xmanipulation.hpp"
#include "xtensor/xmasked_view.hpp"
#include "xtensor/xoperation.hpp"
#include "xtensor/xpad.hpp"
#include "xtensor/xrandom.hpp"
#include "xtensor/xshape.hpp"
#include "xtensor/xsort.hpp"
#include "xtensor/xstrided_view.hpp"
#include "xtensor/xview.hpp"
using namespace xt::placeholders;
#define SCORE_THRESHOLD 0.6
#define IOU_THRESHOLD 0.7
#define NUM_CLASSES 1
std::vector<std::pair<int, int>> JOINT_PAIRS = {
{0, 1},
// {1, 3}, {0, 2}, {2, 4},
// {5, 6}, {5, 7}, {7, 9}, {6, 8}, {8, 10},
// {5, 11}, {6, 12}, {11, 12},
// {11, 13}, {12, 14}, {13, 15}, {14, 16}
};
std::pair<std::vector<KeyPt>, std::vector<PairPairs>> process_single_decoding(const Decodings& dec, const std::vector<int>& network_dims, float joint_threshold=0.5) {
std::vector<KeyPt> keypoints;
std::vector<PairPairs> pairs;
auto keypoint_coordinates_and_score = dec.keypoints;
auto coordinates = keypoint_coordinates_and_score.first;
auto score = keypoint_coordinates_and_score.second;
// Filter keypoints
for (uint i = 0; i < score.shape(0); i++){
if (score(i,0) > joint_threshold) {
keypoints.push_back(KeyPt({coordinates(i, 0) / network_dims[0], coordinates(i, 1) / network_dims[1], score(i,0)}));
}
}
// Filter joints pair
for (const auto& pair : JOINT_PAIRS) {
if (score(pair.first,0) >= joint_threshold && score(pair.second, 0) >= joint_threshold){
PairPairs pr = PairPairs({
std::make_pair(coordinates(pair.first,0) / network_dims[0], coordinates(pair.first,1) / network_dims[1]),
std::make_pair(coordinates(pair.second,0) / network_dims[0], coordinates(pair.second,1) / network_dims[1]),
score(pair.first, 0),
score(pair.second, 0)
});
pairs.push_back(pr);
}
}
return std::make_pair(keypoints, pairs);
}
// filter keypoints iterates over all decodings
std::pair<std::vector<KeyPt>, std::vector<PairPairs>> filter_keypoints(const std::vector<Decodings>& filtered_decodings, const std::vector<int>& network_dims, float joint_threshold=0.5) {
std::vector<KeyPt> filtered_keypoints;
std::vector<PairPairs> filtered_pairs;
for (const auto& dec : filtered_decodings){
auto result = process_single_decoding(dec, network_dims, joint_threshold);
filtered_keypoints.insert(filtered_keypoints.end(), result.first.begin(), result.first.end());
filtered_pairs.insert(filtered_pairs.end(), result.second.begin(), result.second.end());
}
return std::make_pair(filtered_keypoints, filtered_pairs);
}
float iou_calc(const HailoBBox &box_1, const HailoBBox &box_2)
{
// Calculate IOU between two detection boxes
const float width_of_overlap_area = std::min(box_1.xmax(), box_2.xmax()) - std::max(box_1.xmin(), box_2.xmin());
const float height_of_overlap_area = std::min(box_1.ymax(), box_2.ymax()) - std::max(box_1.ymin(), box_2.ymin());
const float positive_width_of_overlap_area = std::max(width_of_overlap_area, 0.0f);
const float positive_height_of_overlap_area = std::max(height_of_overlap_area, 0.0f);
const float area_of_overlap = positive_width_of_overlap_area * positive_height_of_overlap_area;
const float box_1_area = (box_1.ymax() - box_1.ymin()) * (box_1.xmax() - box_1.xmin());
const float box_2_area = (box_2.ymax() - box_2.ymin()) * (box_2.xmax() - box_2.xmin());
// The IOU is a ratio of how much the boxes overlap vs their size outside the overlap.
// Boxes that are similar will have a higher overlap threshold.
return area_of_overlap / (box_1_area + box_2_area - area_of_overlap);
}
std::vector<Decodings> nms(std::vector<Decodings> &decodings, const float iou_thr, bool should_nms_cross_classes = false) {
std::vector<Decodings> decodings_after_nms;
for (uint index = 0; index < decodings.size(); index++)
{
if (decodings[index].detection_box.get_confidence() != 0.0f)
{
for (uint jindex = index + 1; jindex < decodings.size(); jindex++)
{
if ((should_nms_cross_classes || (decodings[index].detection_box.get_class_id() == decodings[jindex].detection_box.get_class_id())) &&
decodings[jindex].detection_box.get_confidence() != 0.0f)
{
// For each detection, calculate the IOU against each following detection.
float iou = iou_calc(decodings[index].detection_box.get_bbox(), decodings[jindex].detection_box.get_bbox());
// If the IOU is above threshold, then we have two similar detections,
// and want to delete the one.
if (iou >= iou_thr)
{
// The detections are arranged in highest score order,
// so we want to erase the latter detection.
decodings[jindex].detection_box.set_confidence(0.0f);
}
}
}
}
}
for (uint index = 0; index < decodings.size(); index++)
{
if (decodings[index].detection_box.get_confidence() != 0.0f)
{
decodings_after_nms.push_back(Decodings{decodings[index].detection_box, decodings[index].keypoints, decodings[index].joint_pairs});
}
}
return decodings_after_nms;
}
float dequantize_value(uint8_t val, float32_t qp_scale, float32_t qp_zp){
return (float(val) - qp_zp) * qp_scale;
}
void dequantize_box_values(xt::xarray<float>& dequantized_outputs, int index,
xt::xarray<uint8_t>& quantized_outputs,
size_t dim1, size_t dim2, float32_t qp_scale, float32_t qp_zp){
for (size_t i = 0; i < dim1; i++){
for (size_t j = 0; j < dim2; j++){
dequantized_outputs(i, j) = dequantize_value(quantized_outputs(index, i, j), qp_scale, qp_zp);
}
}
}
std::vector<xt::xarray<double>> get_centers(std::vector<int>& strides, std::vector<int>& network_dims,
std::size_t boxes_num, int strided_width, int strided_height){
std::vector<xt::xarray<double>> centers(boxes_num);
for (uint i=0; i < boxes_num; i++) {
strided_width = network_dims[0] / strides[i];
strided_height = network_dims[1] / strides[i];
// Create a meshgrid of the proper strides
xt::xarray<int> grid_x = xt::arange(0, strided_width);
xt::xarray<int> grid_y = xt::arange(0, strided_height);
auto mesh = xt::meshgrid(grid_x, grid_y);
grid_x = std::get<1>(mesh);
grid_y = std::get<0>(mesh);
// Use the meshgrid to build up box center prototypes
auto ct_row = (xt::flatten(grid_y) + 0.5) * strides[i];
auto ct_col = (xt::flatten(grid_x) + 0.5) * strides[i];
centers[i] = xt::stack(xt::xtuple(ct_col, ct_row, ct_col, ct_row), 1);
}
return centers;
}
std::vector<Decodings> decode_boxes_and_keypoints(std::vector<HailoTensorPtr> raw_boxes_outputs,
xt::xarray<float> scores,
std::vector<HailoTensorPtr> raw_keypoints,
std::vector<int> network_dims,
std::vector<int> strides,
int regression_length) {
int strided_width =-1;
int strided_height = -1;
int class_index = 0;
std::vector<Decodings> decodings;
std::vector<PairPairs> joint_pairs;
int instance_index = 0;
float confidence = 0.0;
std::string label;
auto centers = get_centers(std::ref(strides), std::ref(network_dims), raw_boxes_outputs.size(), strided_width, strided_height);
// Box distribution to distance
auto regression_distance = xt::reshape_view(xt::arange(0, regression_length + 1), {1, 1, regression_length + 1});
for (uint i = 0; i < raw_boxes_outputs.size(); i++)
{
// Boxes setup
float32_t qp_scale = raw_boxes_outputs[i]->vstream_info().quant_info.qp_scale;
float32_t qp_zp = raw_boxes_outputs[i]->vstream_info().quant_info.qp_zp;
auto output_b = common::get_xtensor(raw_boxes_outputs[i]);
int num_proposals = output_b.shape(0) * output_b.shape(1);
auto output_boxes = xt::view(output_b, xt::all(), xt::all(), xt::all());
xt::xarray<uint8_t> quantized_boxes = xt::reshape_view(output_boxes, {num_proposals, 4, regression_length + 1});
auto shape = {quantized_boxes.shape(1), quantized_boxes.shape(2)};
// Keypoints setup
float32_t qp_scale_kpts = raw_keypoints[i]->vstream_info().quant_info.qp_scale;
float32_t qp_zp_kpts = raw_keypoints[i]->vstream_info().quant_info.qp_zp;
auto output_keypoints = common::get_xtensor(raw_keypoints[i]);
int num_proposals_keypoints = output_keypoints.shape(0) * output_keypoints.shape(1);
auto output_keypoints_quantized = xt::view(output_keypoints, xt::all(), xt::all(), xt::all());
xt::xarray<uint8_t> quantized_keypoints = xt::reshape_view(output_keypoints_quantized, {num_proposals_keypoints, 2, 3});
auto keypoints_shape = {quantized_keypoints.shape(1), quantized_keypoints.shape(2)};
// Bbox decoding
for (uint j = 0; j < uint(num_proposals); j++) {
confidence = xt::row(scores, instance_index)(0);
instance_index++;
if (confidence < SCORE_THRESHOLD)
continue;
xt::xarray<float> box(shape);
xt::xarray<float> kpts_corrdinates_and_scores(keypoints_shape);
dequantize_box_values(box, j, quantized_boxes,
box.shape(0), box.shape(1),
qp_scale, qp_zp);
common::softmax_2D(box.data(), box.shape(0), box.shape(1));
auto box_distance = box * regression_distance;
xt::xarray<float> reduced_distances = xt::sum(box_distance, {2});
auto strided_distances = reduced_distances * strides[i];
// Decode box
auto distance_view1 = xt::view(strided_distances, xt::all(), xt::range(_, 2)) * -1;
auto distance_view2 = xt::view(strided_distances, xt::all(), xt::range(2, _));
auto distance_view = xt::concatenate(xt::xtuple(distance_view1, distance_view2), 1);
auto decoded_box = centers[i] + distance_view;
HailoBBox bbox(decoded_box(j, 0) / network_dims[0],
decoded_box(j, 1) / network_dims[1],
(decoded_box(j, 2) - decoded_box(j, 0)) / network_dims[0],
(decoded_box(j, 3) - decoded_box(j, 1)) / network_dims[1]);
label = common::coco_eighty[class_index + 1];
HailoDetection detected_instance(bbox, class_index, label, confidence);
// Decode keypoints
dequantize_box_values(kpts_corrdinates_and_scores, j, quantized_keypoints,
kpts_corrdinates_and_scores.shape(0), kpts_corrdinates_and_scores.shape(1),
qp_scale_kpts, qp_zp_kpts);
auto kpts_corrdinates = xt::view(kpts_corrdinates_and_scores, xt::all(), xt::range(0, 2));
auto keypoints_scores = xt::view(kpts_corrdinates_and_scores, xt::all(), xt::range(2, xt::placeholders::_));
kpts_corrdinates *= 2;
auto center = xt::view(centers[i], xt::all(), xt::range(0, 2));
auto center_values = xt::xarray<float>{(float)center(j,0), (float)center(j,1)};
kpts_corrdinates = strides[i] * (kpts_corrdinates - 0.5) + center_values;
// Apply sigmoid to keypoints scores
auto sigmoided_scores = 1 / (1 + xt::exp(-keypoints_scores));
auto keypoint = std::make_pair(kpts_corrdinates, sigmoided_scores);
decodings.push_back(Decodings{detected_instance, keypoint, joint_pairs});
}
}
return decodings;
}
Triple get_boxes_scores_keypoints(std::vector<HailoTensorPtr> &tensors, int num_classes, int regression_length){
std::vector<HailoTensorPtr> outputs_boxes(tensors.size() / 3);
std::vector<HailoTensorPtr> outputs_keypoints(tensors.size() / 3);
// Prepare the scores xarray at the size we will fill in in-place
int total_scores = 0;
for (uint i = 0; i < tensors.size(); i = i + 3) {
total_scores += tensors[i+1]->width() * tensors[i+1]->height();
}
std::vector<size_t> scores_shape = { (long unsigned int)total_scores, (long unsigned int)num_classes};
xt::xarray<float> scores(scores_shape);
int view_index_scores = 0;
for (uint i = 0; i < tensors.size(); i = i + 3)
{
// Bounding boxes extraction will be done later on only on the boxes that surpass the score threshold
outputs_boxes[i / 3] = tensors[i];
// Extract and dequantize the scores outputs
auto dequantized_output_s = common::dequantize(common::get_xtensor(tensors[i+1]), tensors[i+1]->vstream_info().quant_info.qp_scale, tensors[i+1]->vstream_info().quant_info.qp_zp);
int num_proposals_scores = dequantized_output_s.shape(0)*dequantized_output_s.shape(1);
// From the layer extract the scores
auto output_scores = xt::view(dequantized_output_s, xt::all(), xt::all(), xt::all());
xt::view(scores, xt::range(view_index_scores, view_index_scores + num_proposals_scores), xt::all()) = xt::reshape_view(output_scores, {num_proposals_scores, num_classes});
view_index_scores += num_proposals_scores;
// Keypoints extraction will be done later according to the boxes that surpass the threshold
outputs_keypoints[i / 3] = tensors[i+2];
}
return Triple{outputs_boxes, scores, outputs_keypoints};
}
std::vector<Decodings> yolov8pose_postprocess(std::vector<HailoTensorPtr> &tensors,
std::vector<int> network_dims,
std::vector<int> strides,
int regression_length,
int num_classes)
{
std::vector<Decodings> decodings;
if (tensors.size() == 0)
{
return decodings;
}
Triple boxes_scores_keypoints = get_boxes_scores_keypoints(tensors, num_classes, regression_length);
std::vector<HailoTensorPtr> raw_boxes = boxes_scores_keypoints.boxes;
xt::xarray<float> scores = boxes_scores_keypoints.scores;
std::vector<HailoTensorPtr> raw_keypoints = boxes_scores_keypoints.keypoints;
// Decode the boxes and keypoints
decodings = decode_boxes_and_keypoints(raw_boxes, scores, raw_keypoints, network_dims, strides, regression_length);
// Filter with NMS
auto decodings_after_nms = nms(decodings, IOU_THRESHOLD, true);
return decodings_after_nms;
}
/**
* @brief yolov8 postprocess
* Provides network specific paramters
*
* @param roi - HailoROIPtr
* The roi that contains the ouput tensors
*/
std::pair<std::vector<KeyPt>, std::vector<PairPairs>> yolov8(HailoROIPtr roi)
{
// anchor params
int regression_length = 15;
std::vector<int> strides = {8, 16, 32};
std::vector<int> network_dims = {640, 640};
std::vector<HailoTensorPtr> tensors = roi->get_tensors();
auto filtered_decodings = yolov8pose_postprocess(tensors, network_dims, strides, regression_length, NUM_CLASSES);
std::vector<HailoDetection> detections;
for (auto& dec : filtered_decodings){
HailoDetection detection = dec.detection_box;
std::pair<std::vector<KeyPt>, std::vector<PairPairs>> keypoints_and_pairs = process_single_decoding(dec, network_dims, 0.0f);
std::vector<KeyPt> scaled_keypoints = keypoints_and_pairs.first;
// Create an empty xarray with the correct shape
// xt::xarray<float> landmarks = xt::empty<float>({18, 3});
xt::xarray<float> landmarks = xt::empty<float>({int(scaled_keypoints.size()), 3});
// Fill the xarray with the data from the vector
for (size_t i = 0; i < scaled_keypoints.size(); ++i) {
landmarks(i, 0) = scaled_keypoints[i].xs;
landmarks(i, 1) = scaled_keypoints[i].ys;
landmarks(i, 2) = scaled_keypoints[i].joints_scores;
}
hailo_common::add_landmarks_to_detection(detection, "centerpose", landmarks, SCORE_THRESHOLD, JOINT_PAIRS);
detections.push_back(detection);
}
hailo_common::add_detections(roi, detections);
std::pair<std::vector<KeyPt>, std::vector<PairPairs>> keypoints_and_pairs = filter_keypoints(filtered_decodings, network_dims);
return keypoints_and_pairs;
}
//******************************************************************
// DEFAULT FILTER
//******************************************************************
void filter(HailoROIPtr roi)
{
yolov8(roi);
}
I have changed JOINT_PAIRS
std::vector<std::pair<int, int>> JOINT_PAIRS = {
{0, 1},
// {1, 3}, {0, 2}, {2, 4},
// {5, 6}, {5, 7}, {7, 9}, {6, 8}, {8, 10},
// {5, 11}, {6, 12}, {11, 12},
// {11, 13}, {12, 14}, {13, 15}, {14, 16}
};
and
xt::xarray<uint8_t> quantized_keypoints = xt::reshape_view(output_keypoints_quantized, {num_proposals_keypoints, 2, 3}); // 17 -> 2(My custom keypoints)
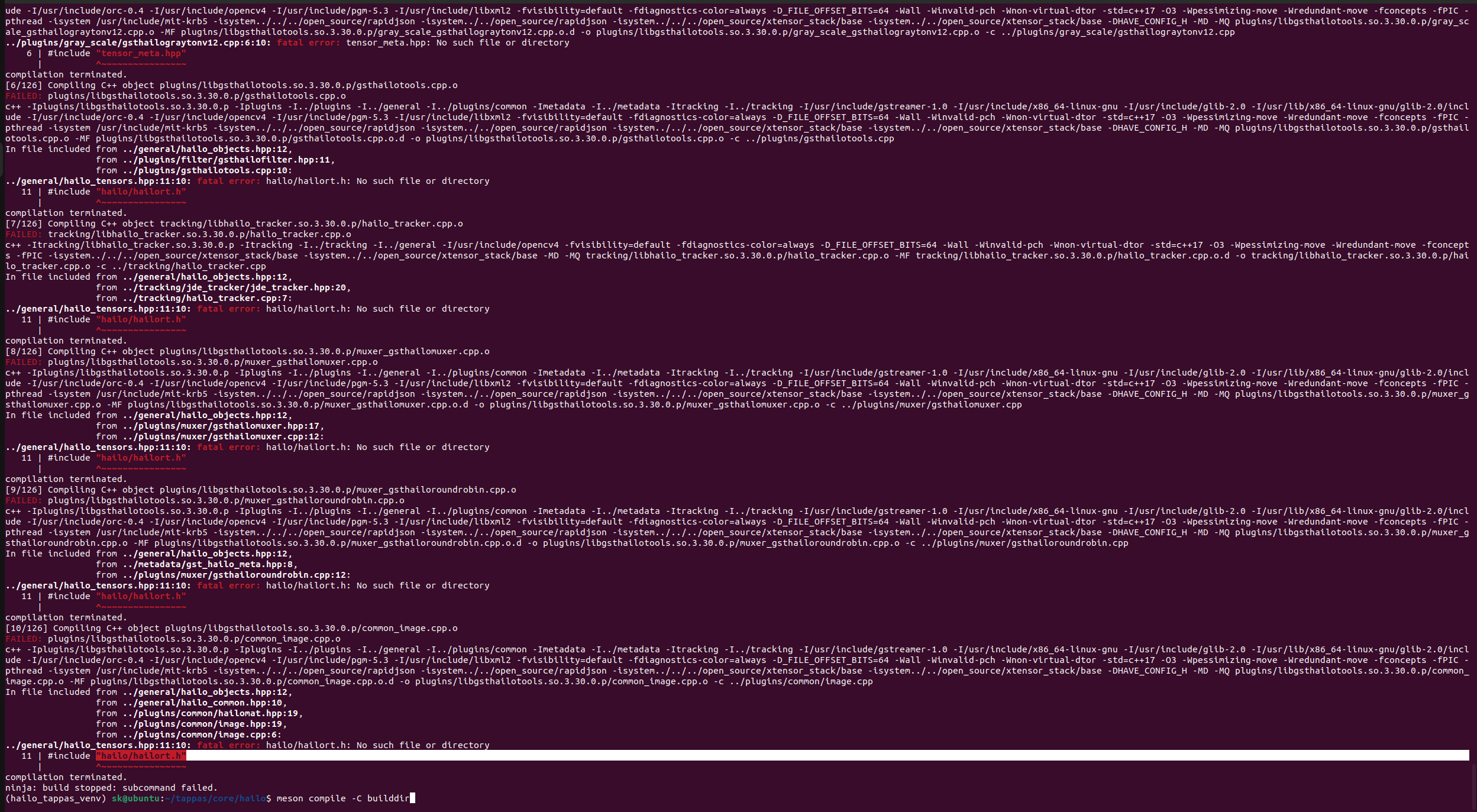
I am using hailo-rpi5-examples/compile_postprocess.sh at main · hailo-ai/hailo-rpi5-examples · GitHub to compile.
There is another issue as well. I am getting the two points values are almost same.