Thank you @omria !
That helped me lot. Unfortunately the provided code doesn’t produce any mask at all. I’m assuming it’s something to do with how mask_overlay is created. I have managed to get it working though. I had to add binary mask, and ensure it’s applied to all three color channels:
binary_mask = (mask_resized> 0.2) * 255
# Create a mask overlay for the person
mask_overlay = np.zeros_like(frame)
mask_overlay[y_min:y_max, x_min:x_max, :] = cv2.merge([binary_mask] * 3)
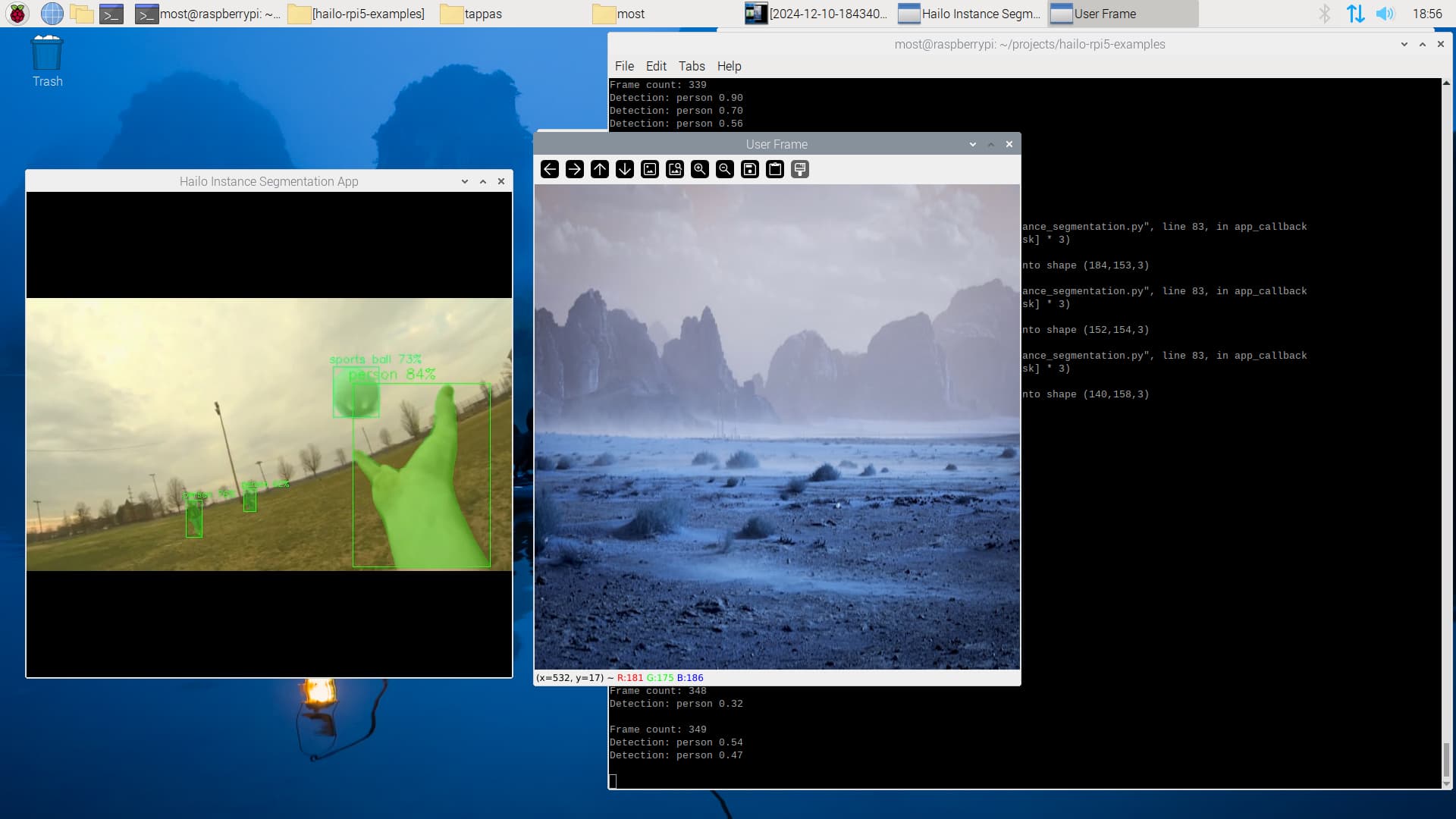
I’m not too satisfied with the results though. The resizing of the mask produces extremely pixelated image:
So I’ve played around with interpolation method and INTER_CUBIC seems to be quite good:
The problem I have personally is the mediocre results on the final video. I am using this free video from pexels - https://www.pexels.com/video/baseball-training-852399/ and here is what I got:
Obviously, ignore the perspective and lighting issue. I believe those, once set correctly will add to the realism, but so far I’m focused on the mask itself.
More importantly sometimes the mask doesn’t appear at all:
Additionally I see extreme CPU usage on my RPi5 when utilizins script with PiCamera module:
I believe in the power of community, therefore I would like to find out:
- How to get better quality mask?
- Why sometimes mask doesn’t appear on the buffer frame?
- How to replace the main preview with the one from the buffer?
My full script for reference:
import gi
gi.require_version('Gst', '1.0')
from gi.repository import Gst, GLib
import os
import numpy as np
import cv2
import hailo
from hailo_rpi_common import (
get_caps_from_pad,
get_numpy_from_buffer,
app_callback_class,
)
from instance_segmentation_pipeline import GStreamerInstanceSegmentationApp
# -----------------------------------------------------------------------------------------------
# User-defined class to be used in the callback function
# -----------------------------------------------------------------------------------------------
# Inheritance from the app_callback_class
class user_app_callback_class(app_callback_class):
def __init__(self):
super().__init__()
# -----------------------------------------------------------------------------------------------
# User-defined callback function
# -----------------------------------------------------------------------------------------------
# This is the callback function that will be called when data is available from the pipeline
def app_callback(pad, info, user_data):
# Get the GstBuffer from the probe info
buffer = info.get_buffer()
if buffer is None:
return Gst.PadProbeReturn.OK
# Using the user_data to count the number of frames
user_data.increment()
string_to_print = f"Frame count: {user_data.get_count()}\n"
# Get the caps from the pad
format, width, height = get_caps_from_pad(pad)
# If the user_data.use_frame is set to True, we can get the video frame from the buffer
frame = None
if user_data.use_frame and format is not None and width is not None and height is not None:
# Get video frame
frame = get_numpy_from_buffer(buffer, format, width, height)
# Get the detections from the buffer
roi = hailo.get_roi_from_buffer(buffer)
detections = roi.get_objects_typed(hailo.HAILO_DETECTION)
# Load static background image and resize to match frame dimensions
background = cv2.imread("background.jpg")
background = cv2.resize(background, (width, height))
# Parse the detections
for detection in detections:
label = detection.get_label()
bbox = detection.get_bbox()
confidence = detection.get_confidence()
if label == "person":
string_to_print += (f"Detection: {label} {confidence:.2f}\n")
if user_data.use_frame:
# Get instance segmentation mask from detection
masks = detection.get_objects_typed(hailo.HAILO_CONF_CLASS_MASK)
if len(masks) > 0:
mask = masks[0]
mask_height = mask.get_height()
mask_width = mask.get_width()
mask_data = np.array(mask.get_data()).reshape((mask_height, mask_width))
# Resize mask to match bounding box size
mask_resized = cv2.resize(mask_data, (mask_width * 4, mask_height * 4), interpolation=cv2.INTER_CUBIC)
# Get coordinates to place mask on the frame
x_min, y_min = int(bbox.xmin() * width), int(bbox.ymin() * height)
x_max, y_max = min(x_min + mask_resized.shape[1], width), min(y_min + mask_resized.shape[0], height)
binary_mask = (mask_resized> 0.5) * 255
# Create a mask overlay for the person
mask_overlay = np.zeros_like(frame)
mask_overlay[y_min:y_max, x_min:x_max, :] = cv2.merge([binary_mask] * 3)
# Apply the mask to extract the person and background
person = cv2.bitwise_and(frame, mask_overlay)
background_mask = cv2.bitwise_not(mask_overlay)
background_masked = cv2.bitwise_and(background, background_mask)
# Combine the person and background
frame = cv2.add(person, background_masked)
print(string_to_print)
if user_data.use_frame:
# Convert the frame to BGR for display
frame = cv2.cvtColor(frame, cv2.COLOR_RGB2BGR)
user_data.set_frame(frame)
return Gst.PadProbeReturn.OK
if __name__ == "__main__":
# Create an instance of the user app callback class
user_data = user_app_callback_class()
app = GStreamerInstanceSegmentationApp(app_callback, user_data)
app.run()