Hi, I’m working with rasspberry pi 5 and hailo-8l on it. I have installed Ubuntu 24.04, converted my custom model to hef format and am doing object detection. It works, but then I need to connect ROS2 to it. Please tell me which version of ros2 is better to work with and how to install it correctly.
My rpi-5 has hailort and its drivers version 4.19 and tappas version 3.30.
Hey @vlad.purhin,
Here’s how to set up ROS 2 on your Raspberry Pi 5 with Ubuntu 24.04 and Hailo-8L:
- Install ROS 2 Iron Irwini
# Add required repositories sudo apt update && sudo apt install -y software-properties-common sudo add-apt-repository universe sudo apt update && sudo apt install curl -y # Add ROS 2 repository curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.key | sudo apt-key add - sudo sh -c 'echo "deb [arch=arm64] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list' # Install ROS 2 sudo apt update sudo apt install ros-iron-desktop # Set up environment echo "source /opt/ros/iron/setup.bash" >> ~/.bashrc source ~/.bashrc
Notes:
- ROS 2 Iron Irwini is recommended for Ubuntu 24.04
- This setup includes the full desktop installation
- The environment will be automatically sourced in new terminals
Let me know if you need help with anything specific!
Hello @omria,
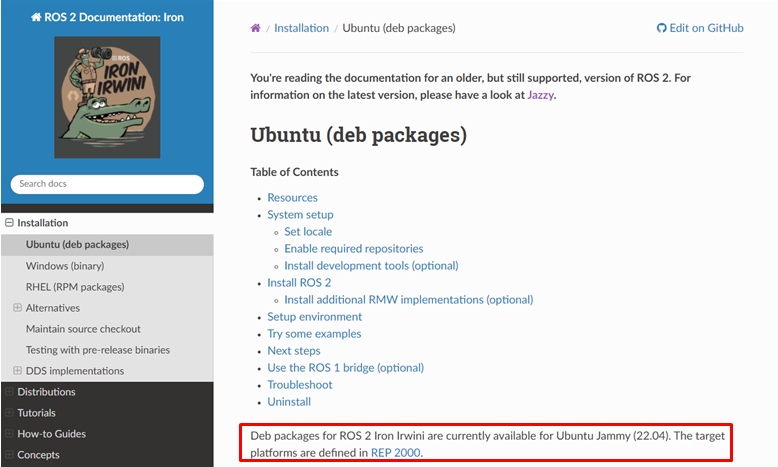
Unfortunately, at the installation stage, I get an error because of packages that are not available to me. I searched the internet and found in the official documentation that ROS2 Iron is currently available for Ubuntu 22.04.
Hey,
i would recommend using ros2 jazzy, only problem is that there is only a python 3.11 whl, but you can create your own one from the sources.
Made a short guide here:
Hey I just released this project where Hailo tappas and ROS2 are bundled together in a debian docker container with a fully working example in python. The solution is super performant in RPi5 allowing for 3 models to run in parallel with low CPU usage in the host.
Check it out here: GitHub - kyrikakis/hailo_tappas_ros2