Hi @Nadav,
I trained a yolov8s model for square boxes, can you explain further what you mean with “input” if you referring to the the camera it’s always the raspberry pi camera module 3 camera, when you mean the dataset the pictures were taken from my phone camera and the raspberry pi camera module 3 I created a data set in roboflow, my “old” Hef file got an pt model which dataset was not stretched to a square format, but the yolo training in Colab made it in a square format, I followed the following tutorial for the conversion from ONNX to HEF Raspberry Pi AI Kit: ONNX to HEF Conversion.
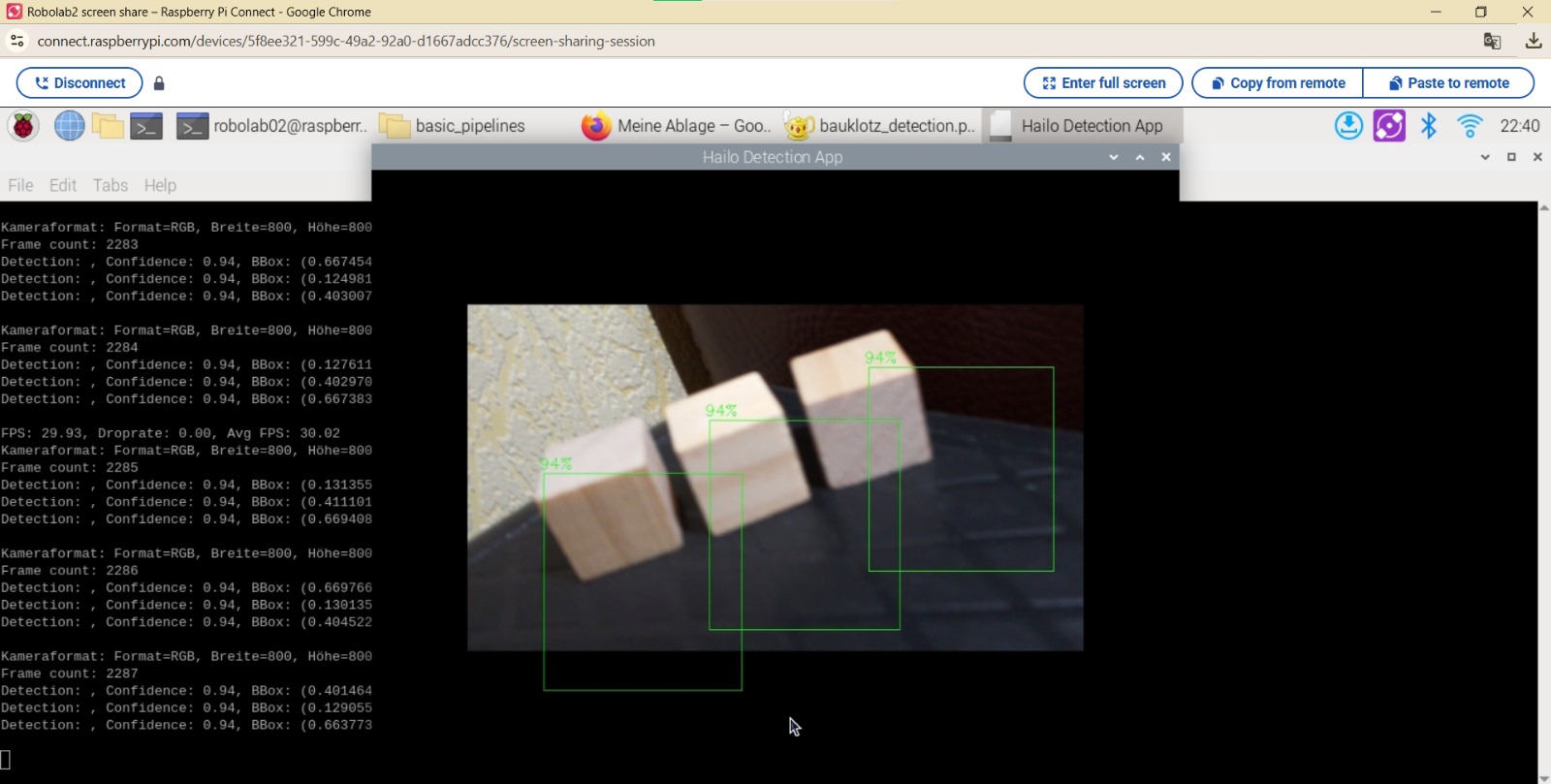
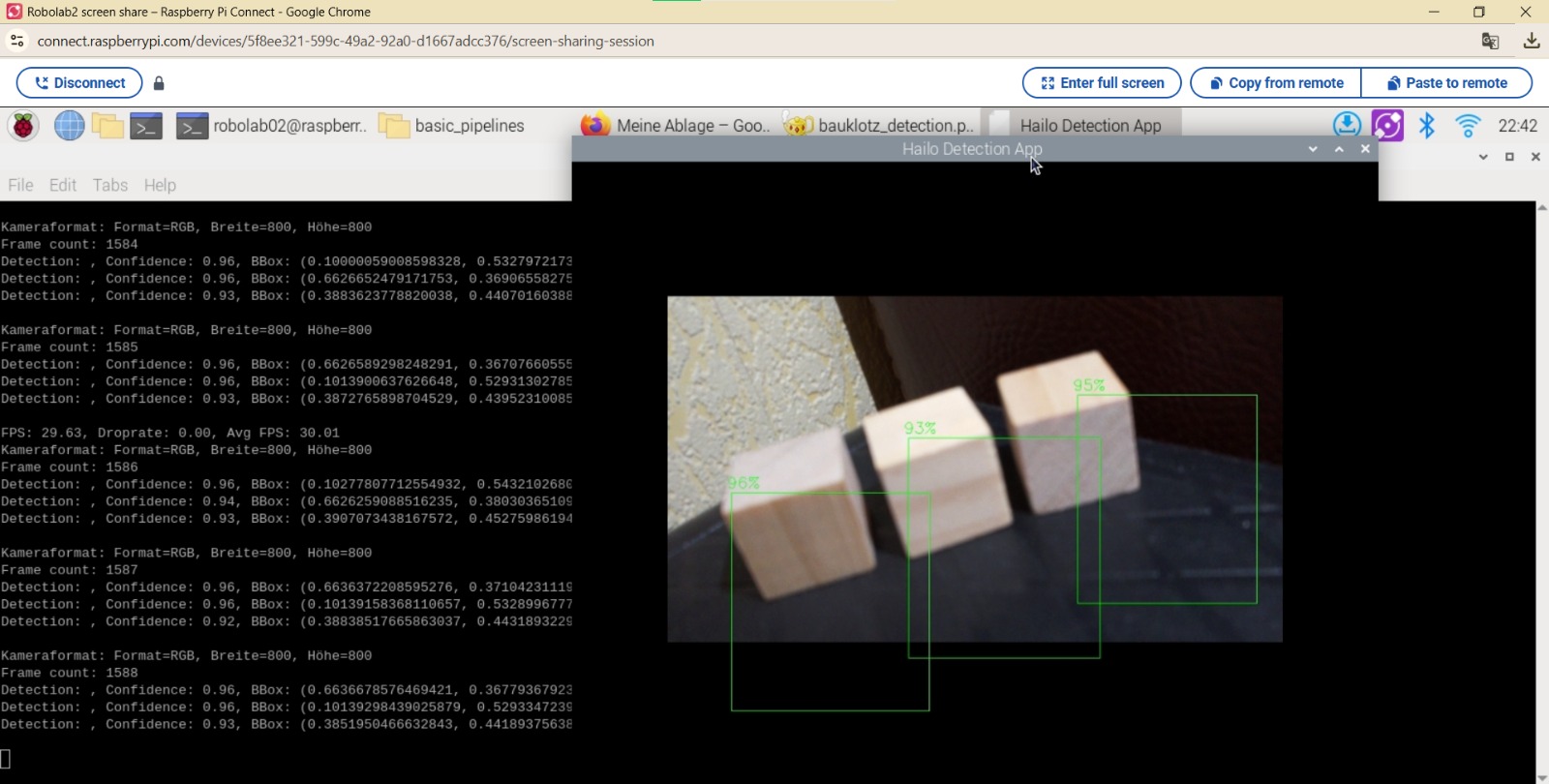
Since I didn’t use GPU the process took WSL2 with Ubuntu 22.04 3 and a half hours. So when I finally adjusted the jyson put my files in the right folders of the hailo_rpi5-examples folder, I saw the following outcome when I use the adjusted detection.py script (I am adding for you my json and detection.pipeline script):
detection.py
import gi
gi.require_version('Gst', '1.0')
from gi.repository import Gst, GLib
import os
import numpy as np
import cv2
import hailo
from hailo_rpi_common import (
get_caps_from_pad,
get_numpy_from_buffer,
app_callback_class,
)
from detection_pipeline import GStreamerDetectionApp
# -----------------------------------------------------------------------------------------------
# User-defined class to be used in the callback function
# -----------------------------------------------------------------------------------------------
# Inheritance from the app_callback_class
class user_app_callback_class(app_callback_class):
def __init__(self):
super().__init__()
self.new_variable = 42 # New variable example
def new_function(self): # New function example
return "The meaning of life is: "
# -----------------------------------------------------------------------------------------------
# User-defined callback function
# -----------------------------------------------------------------------------------------------
# This is the callback function that will be called when data is available from the pipeline
def app_callback(pad, info, user_data):
# Get the GstBuffer from the probe info
buffer = info.get_buffer()
# Check if the buffer is valid
if buffer is None:
return Gst.PadProbeReturn.OK
# Using the user_data to count the number of frames
user_data.increment()
string_to_print = f"Frame count: {user_data.get_count()}\n"
# Get the caps from the pad
format, width, height = get_caps_from_pad(pad)
# Debug-Ausgabe des Kameraformats
print(f"Kameraformat: Format={format}, Breite={width}, Höhe={height}")
# If the user_data.use_frame is set to True, we can get the video frame from the buffer
frame = None
if user_data.use_frame and format is not None and width is not None and height is not None:
# Get video frame
frame = get_numpy_from_buffer(buffer, format, width, height)
frame = cv2.resize(frame, (2304, 1296)) # Originalauflösung der Kamera
# Get the detections from the buffer
roi = hailo.get_roi_from_buffer(buffer)
detections = roi.get_objects_typed(hailo.HAILO_DETECTION)
# Parse the detections
detection_count = 0
for detection in detections:
label = detection.get_label()
bbox = detection.get_bbox()
confidence = detection.get_confidence()
# Bounding Box-Koordinaten extrahieren
xmin, ymin, xmax, ymax = bbox.xmin(), bbox.ymin(), bbox.xmax(), bbox.ymax()
# Debug-Ausgabe
string_to_print += f"Detection: {label}, Confidence: {confidence:.2f}, BBox: ({xmin}, {ymin}), ({xmax}, {ymax})\n"
# Zeichne die Bounding Box, falls ein Frame verfügbar ist
if user_data.use_frame and frame is not None:
cv2.rectangle(frame, (int(xmin), int(ymin)), (int(xmax), int(ymax)), (255, 0, 0), 2)
cv2.putText(frame, f"{label} ({confidence:.2f})", (int(xmin), int(ymin) - 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 0, 0), 2)
detection_count += 1
if user_data.use_frame:
# Print the detection count to the frame
cv2.putText(frame, f"Detections: {detection_count}", (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
cv2.putText(frame, f"{user_data.new_function()} {user_data.new_variable}", (10, 60),
cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
frame = cv2.cvtColor(frame, cv2.COLOR_RGB2BGR)
user_data.set_frame(frame)
print(string_to_print)
return Gst.PadProbeReturn.OK
if __name__ == "__main__":
# Create an instance of the user app callback class
user_data = user_app_callback_class()
app = GStreamerDetectionApp(app_callback, user_data)
app.run()
detection.pipeline:
import gi
gi.require_version('Gst', '1.0')
from gi.repository import Gst, GLib
import os
import argparse
import multiprocessing
import numpy as np
import setproctitle
import cv2
import time
import hailo
from hailo_rpi_common import (
get_default_parser,
QUEUE,
SOURCE_PIPELINE,
INFERENCE_PIPELINE,
INFERENCE_PIPELINE_WRAPPER,
USER_CALLBACK_PIPELINE,
DISPLAY_PIPELINE,
GStreamerApp,
app_callback_class,
dummy_callback,
detect_hailo_arch,
)
# -----------------------------------------------------------------------------------------------
# User Gstreamer Application
# -----------------------------------------------------------------------------------------------
# This class inherits from the hailo_rpi_common.GStreamerApp class
class GStreamerDetectionApp(GStreamerApp):
def __init__(self, app_callback, user_data):
parser = get_default_parser()
parser.add_argument(
"--labels-json",
default=None,
help="Path to costume labels JSON file",
)
args = parser.parse_args()
# Call the parent class constructor
super().__init__(args, user_data)
# Additional initialization code can be added here
# Set Hailo parameters these parameters should be set based on the model used
self.batch_size = 2
self.network_width = 800
self.network_height = 800
self.network_format = "RGB"
nms_score_threshold = 0.3
nms_iou_threshold = 0.45
# Determine the architecture if not specified
if args.arch is None:
detected_arch = detect_hailo_arch()
if detected_arch is None:
raise ValueError("Could not auto-detect Hailo architecture. Please specify --arch manually.")
self.arch = detected_arch
print(f"Auto-detected Hailo architecture: {self.arch}")
else:
self.arch = args.arch
if args.hef_path is not None:
self.hef_path = args.hef_path
# Set the HEF file path based on the arch
elif self.arch == "hailo8":
self.hef_path = os.path.join(self.current_path, '../resources/yolov8m.hef')
else: # hailo8l
self.hef_path = os.path.join(self.current_path, '../resources/yolov8s_h8l.hef')
# Set the post-processing shared object file
self.post_process_so = os.path.join(self.current_path, '../resources/libyolo_hailortpp_postprocess.so')
# User-defined label JSON file
self.labels_json = args.labels_json
self.app_callback = app_callback
self.thresholds_str = (
f"nms-score-threshold={nms_score_threshold} "
f"nms-iou-threshold={nms_iou_threshold} "
f"output-format-type=HAILO_FORMAT_TYPE_FLOAT32"
)
# Set the process title
setproctitle.setproctitle("Hailo Detection App")
self.create_pipeline()
def get_pipeline_string(self):
source_pipeline = SOURCE_PIPELINE(self.video_source)
detection_pipeline = INFERENCE_PIPELINE(
hef_path=self.hef_path,
post_process_so=self.post_process_so,
batch_size=self.batch_size,
config_json=self.labels_json,
additional_params=self.thresholds_str)
user_callback_pipeline = USER_CALLBACK_PIPELINE()
display_pipeline = DISPLAY_PIPELINE(video_sink=self.video_sink, sync=self.sync, show_fps=self.show_fps)
pipeline_string = (
f'{source_pipeline} '
f'{detection_pipeline} ! '
f'{user_callback_pipeline} ! '
f'{display_pipeline}'
)
print(pipeline_string)
return pipeline_string
if __name__ == "__main__":
# Create an instance of the user app callback class
user_data = app_callback_class()
app_callback = dummy_callback
app = GStreamerDetectionApp(app_callback, user_data)
app.run()
labels.son
{
"iou_threshold": 0.4,
"detection_threshold": 0.5,
"output_activation": 0.5,
"label_offset": 0.5,
"max_boxes":3,
"labels": [
"Bauklotz"
]
}
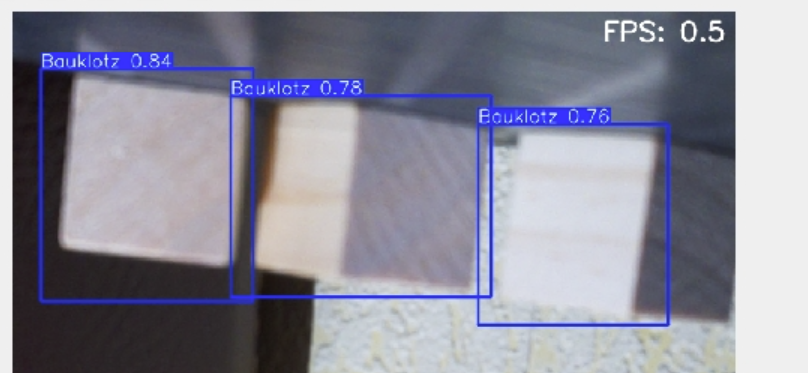
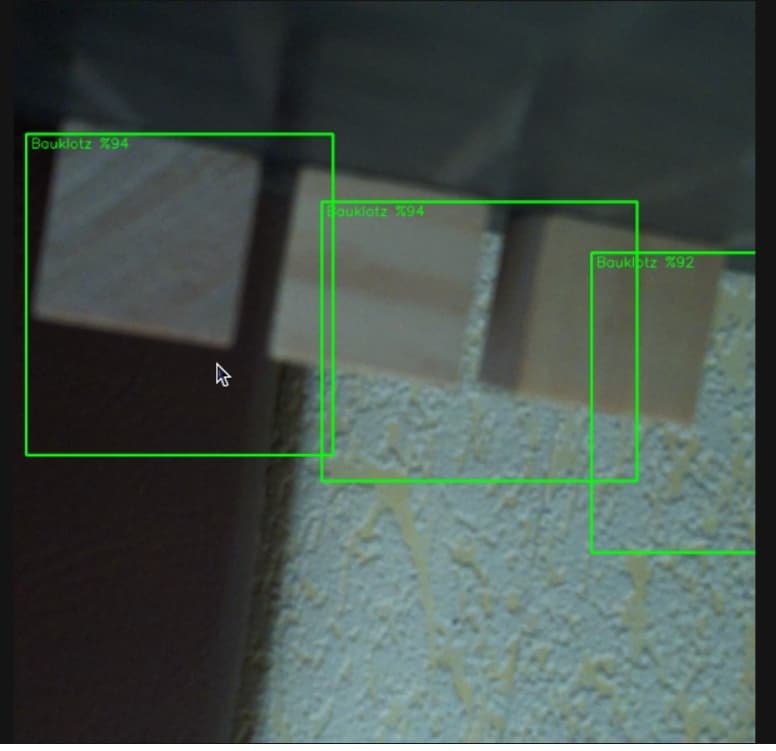
I initally thought maybe it can be a problem with the size, so I cropped all of my pictures to the format 800x800 and again trained a model had the onnx file ready, compiled it and in the end had near identical results as the other HEF File → Disoriented bboxes:
as you can see in the tutorial i linked there weren’t any alls just a “simple” command: “hailomz compile yolov8s --ckpt=cybest.onnx --hw-arch hailo8l --calib-path train/images --classes 2 --performance” , the images in “train/images” I used here were the ones I trained the model with.
I get also a bit confused to be honest, some in this forum are able to compile their model with one command like this colleague right here https://community.hailo.ai/t/how-to-modify-yolov8n-yaml-file-when-compiling-hailomz/5082/2 and other have to prepare three different files for the conversion, the nms_config.json, the yaml and another one… I really respect the people that do these kind of projects as their hobby. And I also see the fun in it but as I said, it soon will be three months since I started and I really want to end this project with a nice HEF file 
FYI: I really appreciate your answer and I really encourage others to join the community and ask their question, I regret taking so long and thinking about making an account and joining the community, I also read the other posts and you guys really make a difference and try to help, thank you for helping out!! @Nadav @omria @pierrem