Hi all,
I have a Pi5 with AI HAT+ and I use PI OS Lite for my project. I’m pretty new to all this and need a bit help.
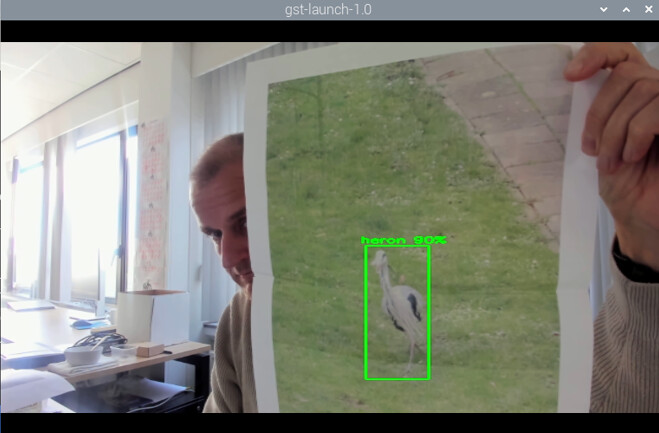
The goal of my project is detecting ‘herons’ who come visit my pond and in the end I want to scare them away. I’m using a simple Reolink camera and Frigate with a custom trained model in order to detect them.
All seems to be working fine as Frigate starts, I see my camera feed and no errors or warnings are mentioned in the Frigate logs.
After a while, when a motion is send to the HAILO8L chip for processing (Green box around object in debug view Frigate), Frigate suddenly stops and the watchdogs restarts Frigate. Without motion, the system remains stable. When detection is processed again the reboot happens again, and again, …
Below the last part of my Frigate log when things start to go wrong:
2025-10-20 19:20:04.039774449 [2025-10-20 19:20:04] frigate.api.fastapi_app INFO : FastAPI started
2025-10-20 19:20:11.052746746 Process detector:hailo:
2025-10-20 19:20:11.052753394 Traceback (most recent call last):
2025-10-20 19:20:11.052755097 File “/usr/lib/python3.11/multiprocessing/process.py”, line 314, in _bootstrap
2025-10-20 19:20:11.052756190 self.run()
2025-10-20 19:20:11.052757449 File “/opt/frigate/frigate/util/process.py”, line 41, in run_wrapper
2025-10-20 19:20:11.052758338 return run(*args, **kwargs)
2025-10-20 19:20:11.052759283 ^^^^^^^^^^^^^^^^^^^^
2025-10-20 19:20:11.052760394 File “/usr/lib/python3.11/multiprocessing/process.py”, line 108, in run
2025-10-20 19:20:11.052761412 self._target(*self._args, **self._kwargs)
2025-10-20 19:20:11.052762949 File “/opt/frigate/frigate/object_detection/base.py”, line 136, in run_detector
2025-10-20 19:20:11.052764005 detections = object_detector.detect_raw(input_frame) 2025-10-20 19:20:11.052765079 ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
2025-10-20 19:20:11.052766283 File “/opt/frigate/frigate/object_detection/base.py”, line 86, in detect_raw
2025-10-20 19:20:11.052767375 return self.detect_api.detect_raw(tensor_input=tensor_input)
2025-10-20 19:20:11.052771301 ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
2025-10-20 19:20:11.052772486 File “/opt/frigate/frigate/detectors/plugins/hailo8l.py”, line 370, in detect_raw
2025-10-20 19:20:11.052774968 if det.shape[0] < 5:
2025-10-20 19:20:11.052775690 ~~~~~~~~~^^^
2025-10-20 19:20:11.052776523 IndexError: tuple index out of range
I’m using docker-compose to run Frigate and the Frigate part in my docker-compose.yml looks like this:
frigate:
container_name: frigate
image: ghcr.io/blakeblackshear/frigate:stable
restart: unless-stopped
privileged: true
shm_size: “512mb”
devices:
- /dev/hailo0:/dev/hailo0
volumes:
- ./frigate/config:/config
- ./frigate/media:/media
- /etc/localtime:/etc/localtime:ro
ports:
- “5000:5000”
- “8554:8554”
- “8555:8555/tcp”
- “8555:8555/udp”
environment:
- TZ=Europe/Brussels
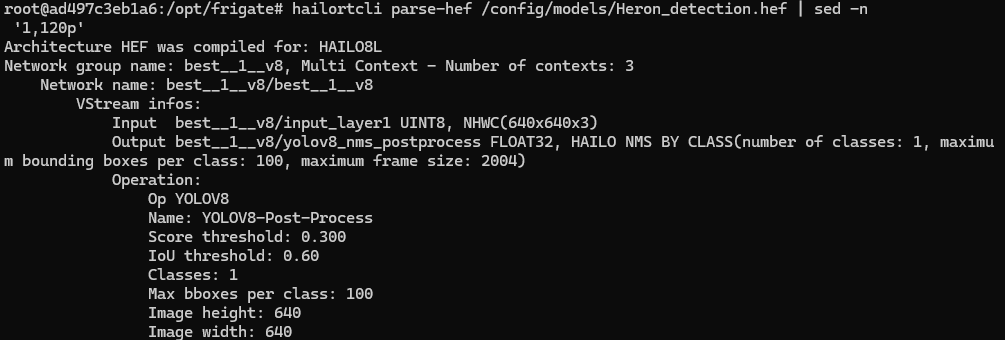
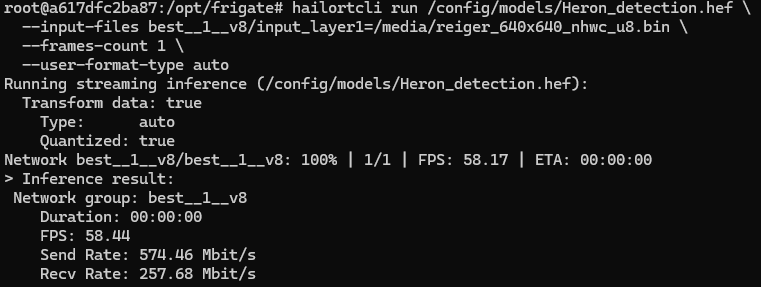
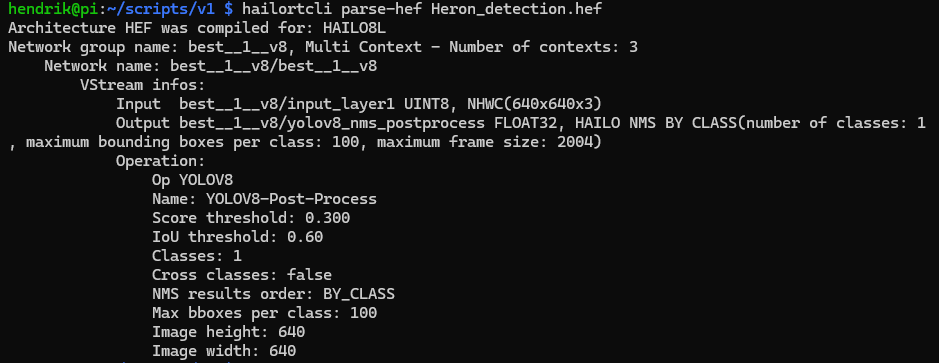
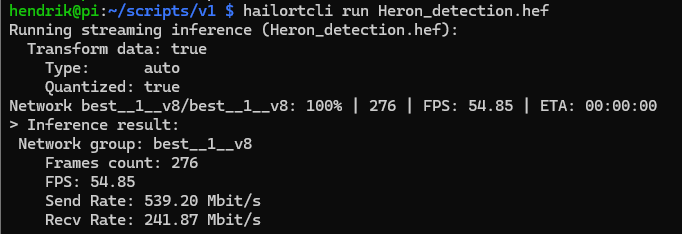
Below some info about my custom model
(initially trained in colab: !yolo task=detect mode=train model=yolov8s.pt data=/content/datasets/maker-nano-2/data.yaml epochs=100 batch=16 imgsz=640 plots=True –> afterwards compiled and quantized)
{
“ConfigVersion”: 11,
“Checksum”: “638865bab42d64cfb46af36e36ceb761ea4cb0437384badeb60c77efea4b3cd8”,
“DEVICE”: [
{
“DeviceType”: “HAILO8L”,
“RuntimeAgent”: “HAILORT”,
“SupportedDeviceTypes”: “HAILORT/HAILO8L, HAILORT/HAILO8”,
“EagerBatchSize”: 1
}
],
“PRE_PROCESS”: [
{
“InputN”: 1,
“InputH”: 640,
“InputW”: 640,
“InputC”: 3,
“InputQuantEn”: true
}
],
“MODEL_PARAMETERS”: [
{
“ModelPath”: “Heron_detection–640x640_quant_hailort_multidevice_1.hef”
}
],
“POST_PROCESS”: [
{
“OutputPostprocessType”: “DetectionYoloHailo”,
“OutputNumClasses”: 1,
“LabelsPath”: “labels_Heron_detection.json”
}
]
}
My frigate.yml:
mqtt:
host: 192.168.0.100
port: 1883
topic_prefix: frigate
user: hendrik
password: xxxxxxxxx
detectors:
hailo:
type: hailo8l
device: PCIe
model:
path: /config/models/Heron_detection.hef
labelmap_path: /config/labelmap/heron.txt
input_pixel_format: rgb
width: 640
height: 640
input_tensor: nhw
input_dtype: int
model_type: yolo-generic
database:
path: /config/frigate.db
logger:
default: info
logs:
frigate.detectors.hailo: debug
frigate.object_detection: debug
birdseye:
enabled: false
objects:
track:
- heron
ffmpeg:
hwaccel_args: preset-rpi-64-h264
go2rtc:
streams:
reolink_main:
- rtsp://admin:piwsij-9zetsU-peqnap@192.168.0.154/h265Preview_01_main
reolink_sub:
- rtsp://admin:piwsij-9zetsU-peqnap@192.168.0.154/h264Preview_01_sub
cameras:
reiger_cam:
detect:
enabled: true
width: 640
height: 640
fps: 3
ffmpeg:
inputs:
- path: rtsp://localhost:8554/reolink_sub
roles:
- detect
- path: rtsp://localhost:8554/reolink_main
roles:
- record
snapshots:
enabled: true
bounding_box: true
crop: false
retain:
default: 10
objects:
track:
- heron
filters:
heron:
min_score: 0.15
threshold: 0.25
min_area: 50
max_area: 999999
motion:
threshold: 30
contour_area: 10
improve_contrast: true
version: 0.16-0
Any help would be welcome as I’m stuck at this point.
Many thanks in advance.