Environment
-
Hardware: Raspberry Pi 5 + Hailo-8L
-
Software: HailoRT 4.19, Tappas 3.30.0
Details
I have 2 classes with different keypoints:
-
deo: Should show 2 keypoints (deo_bottom, deo_top)
-
lighter: Should show 3 keypoints (lighter_bottom, lighter_mid, lighter_top)
The .so file I am having trouble with: libyolov8pose_post.so
Problem: Problems creating a correct .so file
-
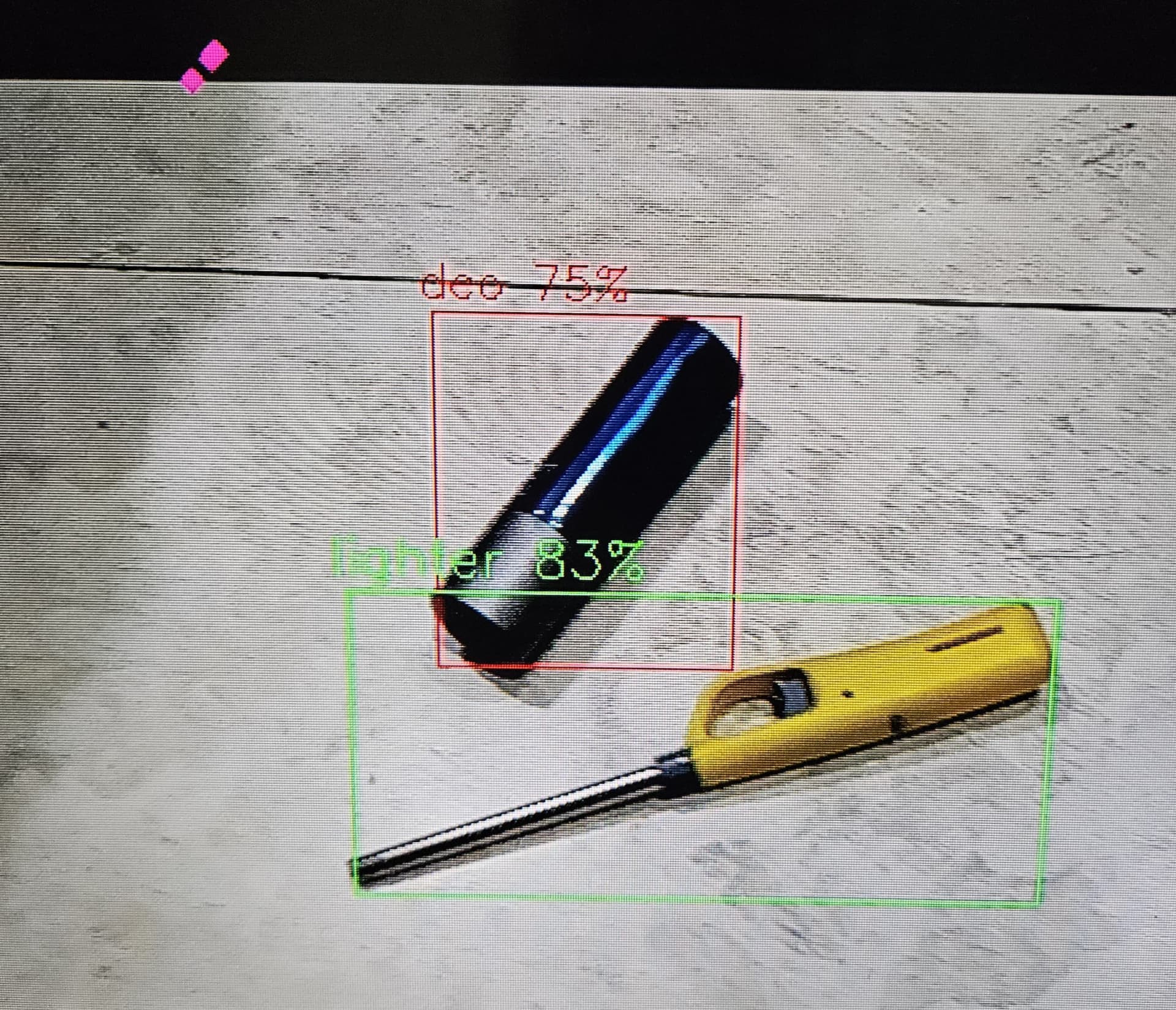
 Bounding boxes work perfectly - I can see both “deo” and “lighter” objects detected with correct labels
Bounding boxes work perfectly - I can see both “deo” and “lighter” objects detected with correct labels -
 Keypoints are missing - I should see 2 keypoints inside the “deo” bbox and 3 keypoints inside the “lighter” bbox, but they don’t appear at all
Keypoints are missing - I should see 2 keypoints inside the “deo” bbox and 3 keypoints inside the “lighter” bbox, but they don’t appear at all -
Only 2 dots visible - These appear outside any bounding box. One dot is larger than the other, which makes me suspect the keypoints might be overlapping at the same location. They move in tandem wrt bboxes
My debug output (terminal)
DEBUG: Detection bbox - xmin: 0.297505, ymin: 0.462294, width: 0.240393, height: 0.0950694
DEBUG: Landmark 0 normalized coords: (0.194664, 0.267652) confidence: 0.0161987
DEBUG: Landmark 1 normalized coords: (0.192605, 0.269344) confidence: 0.0155519
DEBUG: Adding 2 keypoints for class 0 (deo)
DEBUG: Detection bbox - xmin: 0.160458, ymin: 0.571637, width: 0.355206, height: 0.201214
DEBUG: Landmark 0 normalized coords: (0, 0.30443) confidence: 0.049372
DEBUG: Landmark 1 normalized coords: (0, 0.304152) confidence: 0.0497917
DEBUG: Landmark 2 normalized coords: (0, 0.30456) confidence: 0.0493894
DEBUG: Adding 3 keypoints for class 1 (lighter)
Frame count: 130
Key Code Changes Made
1. yolov8pose_postprocess.cpp
// Changed from 1 to 2 classes
#define NUM_CLASSES 2
// Lowered thresholds for 16-bit quantized model
#define SCORE_THRESHOLD 0.4f // was 0.6
float joint_threshold = 0.005f // was 0.5
// Dynamic keypoint handling based on class
int max_keypoints = custom_labels::get_max_keypoints(class_id);
std::vector<std::pair<int, int>> class_joint_pairs = custom_labels::get_joint_pairs(class_id);
// Added coordinate clipping to stay within bounds
xt::view(kpts_corrdinates, xt::all(), 0) = xt::clip(xt::view(kpts_corrdinates, xt::all(), 0), 0.0f, (float)network_dims[0]);
xt::view(kpts_corrdinates, xt::all(), 1) = xt::clip(xt::view(kpts_corrdinates, xt::all(), 1), 0.0f, (float)network_dims[1]);
// Normalize keypoints to 0-1 range to match bbox coordinate system
landmarks(i, 0) = scaled_keypoints[i].xs / network_dims[0]; // x normalized
landmarks(i, 1) = scaled_keypoints[i].ys / network_dims[1]; // y normalized
// Pass to Hailo function
hailo_common::add_landmarks_to_detection(detection, “centerpose”, landmarks, 0.001f, class_joint_pairs);
2. Created custom_labels.hpp
static std::map<uint8_t, std::string> custom_classes = {
{0, "deo"}, {1, "lighter"}
};
static std::map<int, int> max_keypoints_per_class = {
{0, 2}, {1, 3} *// deo: 2 keypoints, lighter: 3 keypoints*
};
static std::map<int, std::vector<std::pair<int, int>>> joint_pairs_per_class = {
{0, {{0, 1}}}, *// deo: connect bottom to top*
{1, {{0, 1}, {1, 2}}} *// lighter: bottom→mid→top chain*
};
3. Modified Functions
-
decode_boxes_and_keypoints(): Added class-specific logic using argmax for multi-class detection
-
process_single_decoding()
-
yolov8(): Passes class ID through the pipeline
Model Details
My model outputs keypoints as UINT16 (not UINT8 like standard models):
Output yolov8s_pose/conv72 UINT16, FCR(20x20x9)
Custom HEF Details:
HEF Properties:
admin@C2:~ $ hailortcli parse-hef yolov8s_pose_04_08_2025.hef
Architecture HEF was compiled for: HAILO8L
Network group name: yolov8s_pose, Multi Context - Number of contexts: 4
Network name: yolov8s_pose/yolov8s_pose
VStream infos:
Input yolov8s_pose/input_layer1 UINT8, NHWC(640x640x3)
Output yolov8s_pose/conv70 UINT8, FCR(20x20x64)
Output yolov8s_pose/conv71 UINT8, NHWC(20x20x2)
Output yolov8s_pose/conv72 UINT16, FCR(20x20x9)
Output yolov8s_pose/conv57 UINT8, FCR(40x40x64)
Output yolov8s_pose/conv58 UINT8, NHWC(40x40x2)
Output yolov8s_pose/conv59 UINT16, FCR(40x40x9)
Output yolov8s_pose/conv43 UINT8, FCR(80x80x64)
Output yolov8s_pose/conv44 UINT8, NHWC(80x80x2)
Output yolov8s_pose/conv45 UINT16, FCR(80x80x9)
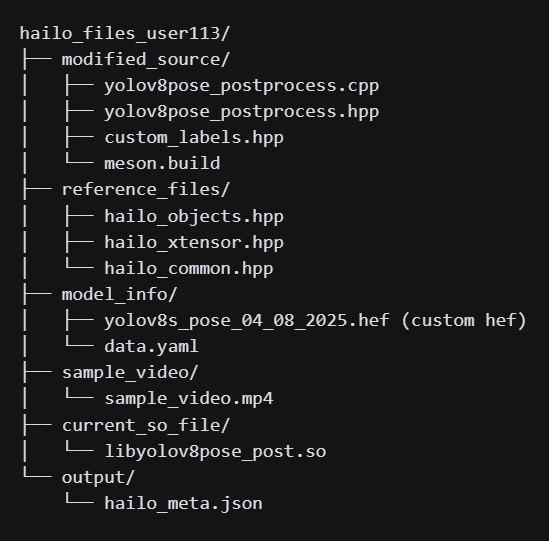
DRIVE LINK
Folder structure:
Could someone help me to implement custom multi-class pose detection with different number of keypoints, and create a compatible .so file? Thanks.